\title {Origins of Mind: Lecture Notes \\ Acting Together }
\maketitle

Acting Together
& Acting as One
s.butterfill@warwick.ac.uk
\def \ititle {Origins of Mind}
\def \isubtitle {Acting Together }
\
\begin{center}
{\Large
\textbf{\ititle}: \isubtitle
}
\iemail %
\end{center}
Humans often act together, and less often they act as one.
My broad aim is to understand what might be involved in our acting as one, and what the
consequences of our ability to act as one might be.
Let me start by clarifying the contrast between acting together and acting as one.
\section{Joint Action vs Parallel but Merely Individual Action}
\section{Joint Action vs Parallel but Merely Individual Action}

The tiny leaves blocked the drain.
Imagine some tiny leaves fall into your drain, blocking it.
The tiny leaves block the drain together.
This is not a matter of any one tiny leaf blocking your drain; rather, it is
a matter of blocking being a common effect of the leaves’ behaviour.
Compare a case involving action.
\section{Bratman on Shared Intention}
\section{Bratman on Shared Intention}
\section{Counterexample to Bratman}
\section{Counterexample to Bratman}

Here is an example of two people who have an unshared intention.
Ayesha and Ahmed. They can each tilt the table, but only along one axis.
(Note that Ayesha can unilaterally intend that they, Ayesha and Ahmed, make the ball hit the red square.)
If you think Ayesha and Ahmed are having a bad hair day, you should see Beatrice and Baldric ...

Now explain that Ayesha and Ahmed have an unshared intention, but Beatrice and Baldric have a shared intention.
I claim that Beatrice and Baldric have a shared intention that they J$_1$
only if
Ayesha and Ahmed have a shared intention.
This claim follows from the similarities of the two cases.
The only difference is that Beatrice and Baldric happen to have same task, whereas Ayesha and Ahmed have different tasks.
But neither Beatrice nor Baldric makes use of the fact that they have the same task.
So if we consider how
Beatrice and Baldric's case
differs from
Ayesha and Ahmed’s,
we can see that these differences do not plausibly amount to a difference with respect to shared agency.
Shared intention cannot feature in one case but not the other.
So I take this case to be an objection to the idea that we can explain acting as one
by appeal to shared intention if we also accept Bratman's claims about what is
sufficient for shared intention.
\section{Parallel Planning}
\section{Parallel Planning}

Suppose you and I are tasked with moving this table through that door.
In doing this, must my plan take into account facts about your intentions as well as about the weight of the table, width of the door &c?
This case has some special features: (i) there is a single most salient route for the table given our objective; (ii) there is a single most salient way of dividing up the roles between us.
I suggest that, in this situation, neither of us needs to form a plan involving the others' intentions.
The situation makes this redundant.
All we have to plan is how two people in our situations should move the table through the door.
To a first approximation, then, what the situation seems to call for is not that our plans are
interconnected but rather that we each make a plan for the table-moving action as a whole.
This is inspiration for the view that we might arrive at sufficient conditions by reflecting on
parallel rather than interconnected planning ...



‘al agency consists, at bottom, in interconnected planning agency of the participants.’
(Bratman 2011, p. 11)
Facts about your plans feature in my plans & conversely.
parallel planning
You plan my actions as well as yours, and I do likewise.
This is why, despite appearances, I think the notion of parallel planning is coherent.
Without irrationality or ignorance, it is possible for us each to plan all of our actions, yours and mine, and to act on these plans.
In doing so we achieve coordination and manifest collective intentionality not by thinking about each other's plans but, more directly, by planning each other's actions.
Let me return for a moment to the Tarantino walkers and what I was calling the Simple Account of shared intention.
According to the Simple Account, we have a shared intention that we walk just if we each intend that we, you and I, walk.
Now, as you may recall, earlier I noted that this seemed not sufficient because we might have and act on such intentions while forcing each other to walk at gunpoint.
It is this problem that Bratman uses to invoke interconnected planning.
But actually we can see that the problem can also be overcome by invoking parallel planning.
Consider the view that for us to exercise shared agency in walking together it is sufficient that:
\begin{enumerate}
\item we each intend that we, you and I walk;
\item we pursue these intentions by means of parallel planning (that is, we each plan all our actions and our plans match); and
\item we each end up with open-ended intentions concerning the components of our plans.
\end{enumerate}
This view rules out the Tarantino walkers (who each point a gun at the other) because pursuing an intention by means parallel planning means taking a practical attitude towards each other's actions.
So, if my conditions are met, your pointing a gun at me would be almost like your pointing a gun at yourself in order to force yourself to do something you intend.
[*skip] One more thing about interconnected and parallel planning.
Earlier I noted that interconnected planning is demanding in two respects: it's demanding with respect to which mechanisms can underpin shared agency, and with respect to which agents can exercise shared agency.
By contrast, parallel planning is not demanding in these respects.
In parallel planning, I don't make plans about your plans, I simply plan your actions.
So it does not demand mechanisms which are capable of meta-planning, nor agents capable of understanding and thinking about others' plans.
Recognising a role for parallel planning in shared agency may thus allow us to understand exercising shared agency might not presuppose deep insights into the nature of minds,
and so tempt us to consider the conjecture that it is through acting together that we first come to understand other minds.
But that is another talk ...
Now so far I've been arguing only that (i) the notion of parallel planning is coherent,
(ii) that parallel planning enables us to coordinate our actions, and (iii) that appeal to
parallel planning might be useful for explaining shared agency because it gives us a way of
ruling out some counterexamples.
But that doesn't, by itself, amount to showing that the notion of parallel planning can
is any more useful than that of interconnected planning.
For all I've said so far, it might be that both parallel and interconnected planning play a
role in corrdinating actions, but neither can be used to give sufficient conditions for
intentional joint action.
Can I do better?

Kourtis et al (2014, figure 1c)
I think we're a long way from having a large body of converging evidence,
but there is some that points in this direction.
One of the most relevant experiments is this one by \citet{kourtis:2014_attention}.
They contrasted a simple joint action involving two agents clinking glasses.

Kourtis et al (2014, figure 1c)

Kourtis et al (2014, figure 1c)
joint
individual-bimanual
individual-unimanual

Sharing a Smile
\section{Sharing a Smile}
\section{Sharing a Smile}


[THIRD POINT: smiling is a goal-directed action, the goal of which is to smile that smile]
My topic is sharing a smile. But first think about ordinary, individual actions like genuine smiles.
What distinguishes a genuine smile from a muscle spasm or the exhalation of wind?
I want to suggest that it's this: the smile is a goal-directed action where the goal is to simile that smile.
But why think of the smile as goal-directed? Because smiling the smile requires considerable motor coordination: it’s not a matter of simple muscle contractions but more like the production of a phonetic gesture where context affects what is needed to realise the smile.

Further, like grasping an object or articulating a particular phoneme, it is an action that can be realised by different bodily movements in different contexts.
This is why I put slides of two quite different but both genuine smiles.
[Objection:]
Now you might say that the smile can't be goal-directed because is isn't explicable by appeal to belief, desire and intention
This is because the genuine smile is spontaneous and not something that can be produced at will (although it could probably be inhibited, at least to some extent); after all, this is what distinguishes the genuine from the polite smile.
\footnote{
From web source: The Duchenne smile involves both voluntary and involuntary contraction from two muscles: the zygomatic major (raising the corners of the mouth) and the orbicularis oculi (raising the cheeks and producing crow's feet around the eyes). The zygomatic major can be voluntarily contracted but many people can't voluntarily contract the orbicularis oculi muscle.
}
So now we might be tempted by the view that a smile is merely caused by an emotion in the way that gasses can cause you to burp.
[Reply:]
Maybe there are smiles like this, but some genuine smiles are sustained.
And what sustains them is a process of controll
How could this be if such smiles are not consequences of beliefs, desires and intentions?
I think a reasonably natural view here is to think that part of what makes an event a smile, a goal-directed action and not just a muscle spasm caused by excess wind, is the way that motor control is involved. Specifically, the genuine smile will involve a motor representation of the outcome, the smile, and this motor representation will lead to movements by way of planning-like motor processes.
But you don't have to buy this to agree with me.
All you have to accept is that actions like some smilings can be goal-directed and controlled even in the absence of relevant beliefs, desires and intentions.
I think smiles fall into the category of actions like graspings, reachings and gesturings which are goal-directed but do not necessarily involve intention.
So far, then, I've suggested that smiling is a goal-directed action, the goal of which is to smile that smile.
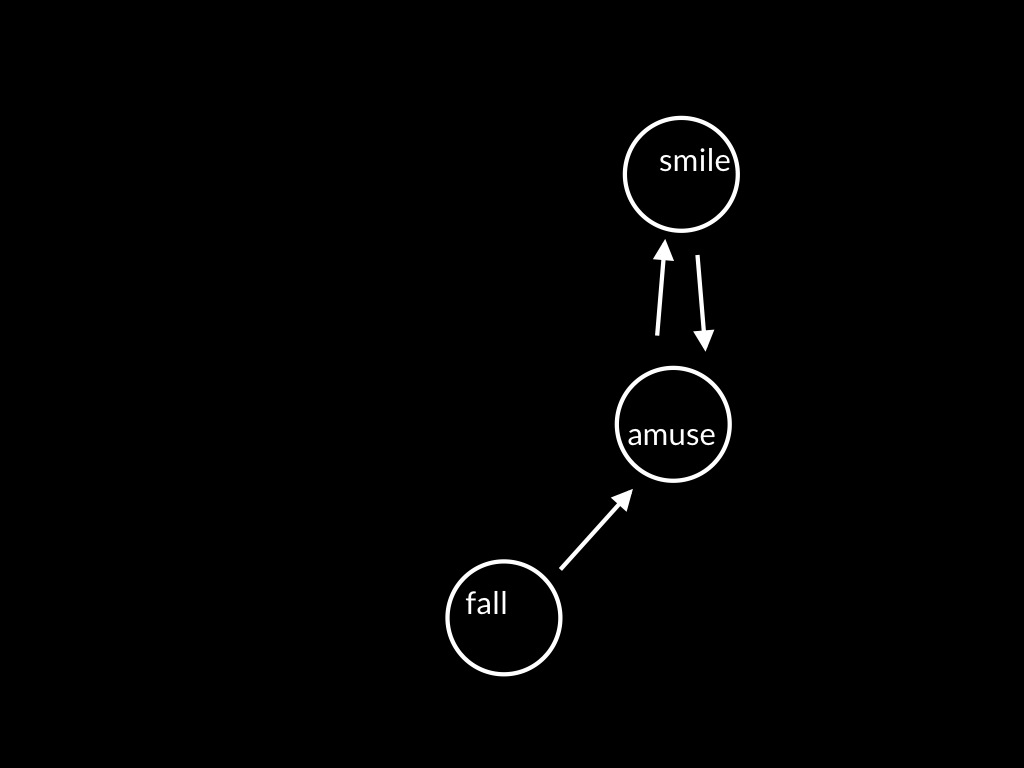
Now imagine a situation where a single individual encounters and event (a clown’s falling) which causes amusement which causes her to smile
Note that the smile also modulates the emotion; if, for example, she supressed the smile, the quality of her amusement would change.
How could we gain insight into the fine-grained dynamics of others’ emotions?
How could we ever appreciate the unfolding of another’s grief, or the way their engagement leads to an explosion of ecstasy at the climax of a concert?
Part of the answer is obvious: by being there, with them.
[Not that this is the only possibility --- in some cases we might be told.]
But how exactly does being there, in the same situation help?
Merely being in the same situation is surely not enough.
It’s not enough that we each experience amusement, grief or ecstasy.
After all, individuals are different. Different individuals’ feelings don’t unfold in the same way just because they are in the same situation.
It’s just here that collective intentionality is relevant.
\textbf{What is involved in sharing a smile?}
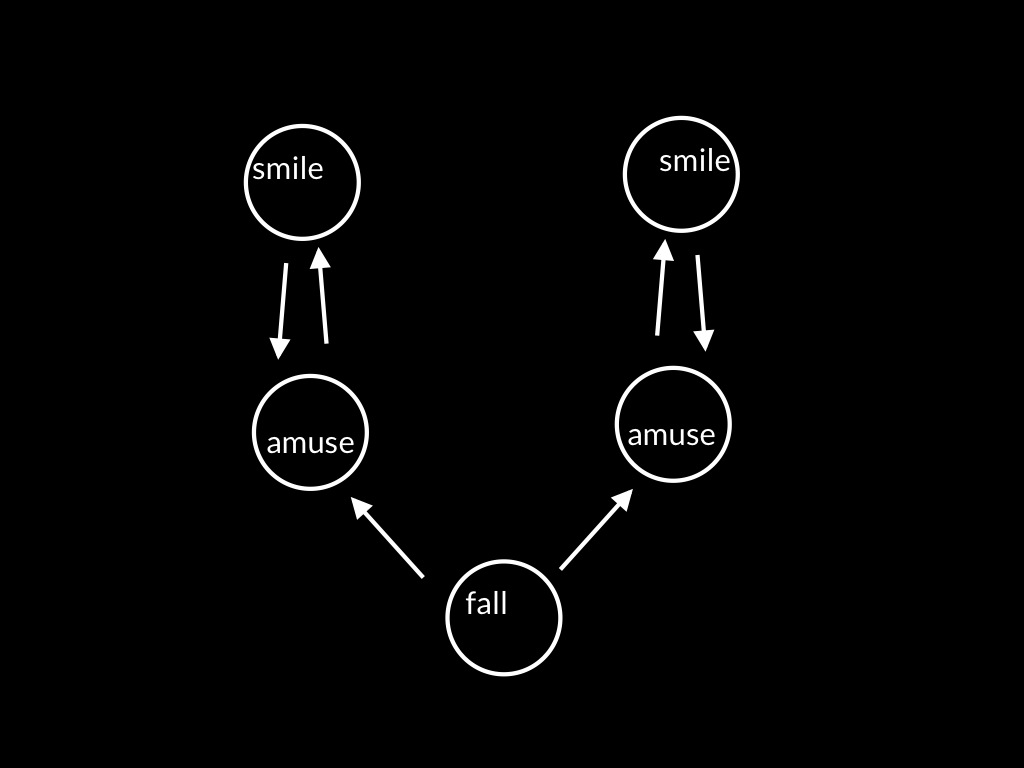
Minimally, I think there have to be two kinds of connection between us for us to share a smile.
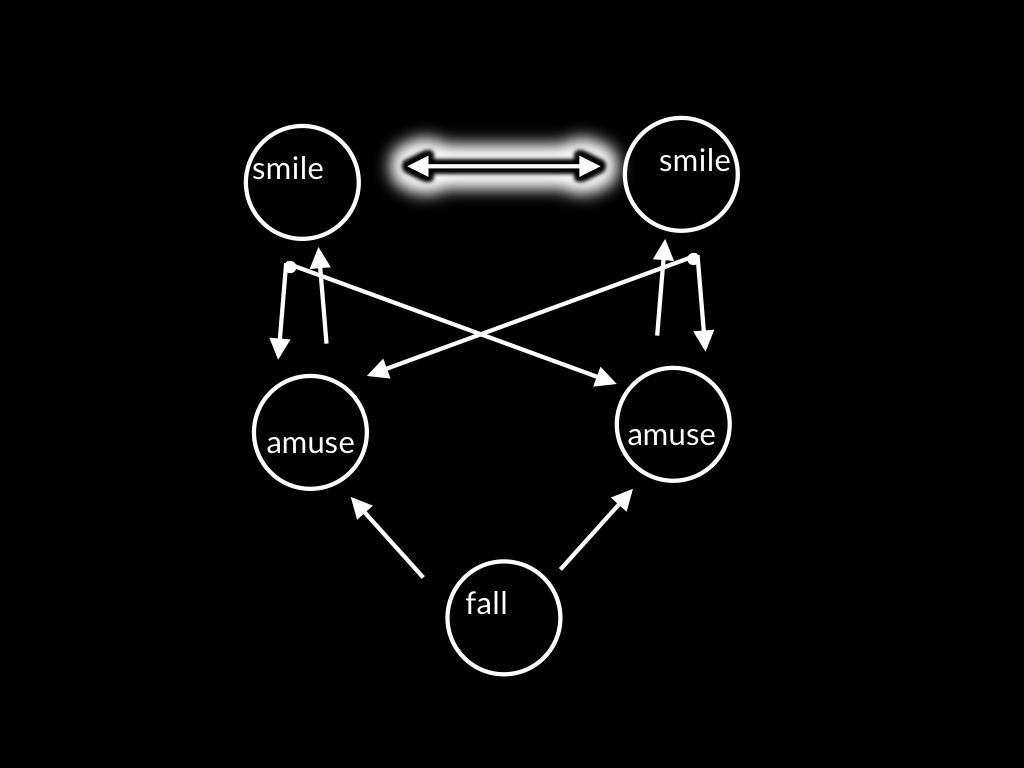
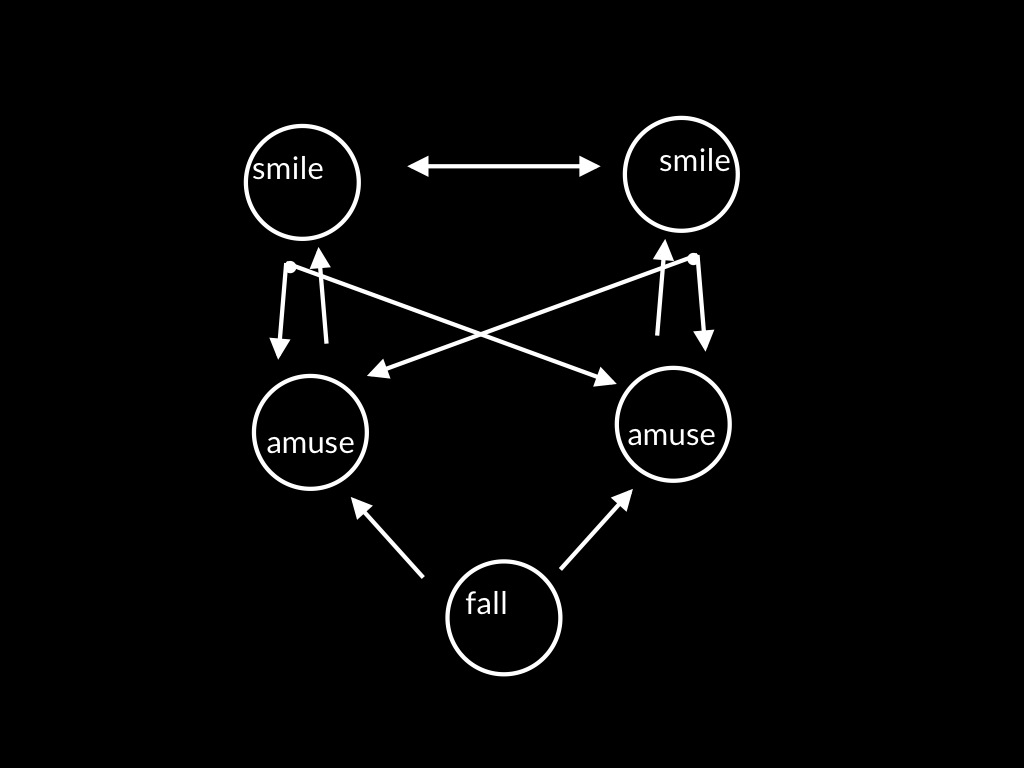
First, the way your smile unfolds is shaped by how mine unfolds and conversely.
I also suppose that our smiles can be minutely coordinated with each other.
But it’s not just that our smiles are interdependent in this way ...
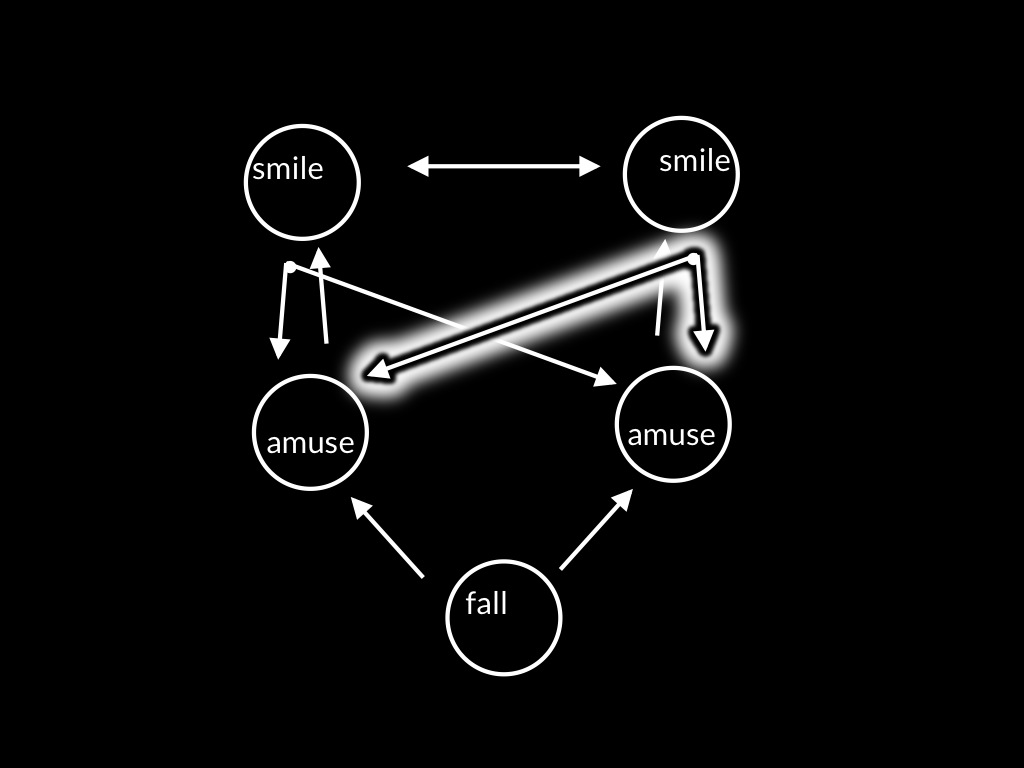
It’s also that each of our smiles is shaping the way our amusement unfolds.
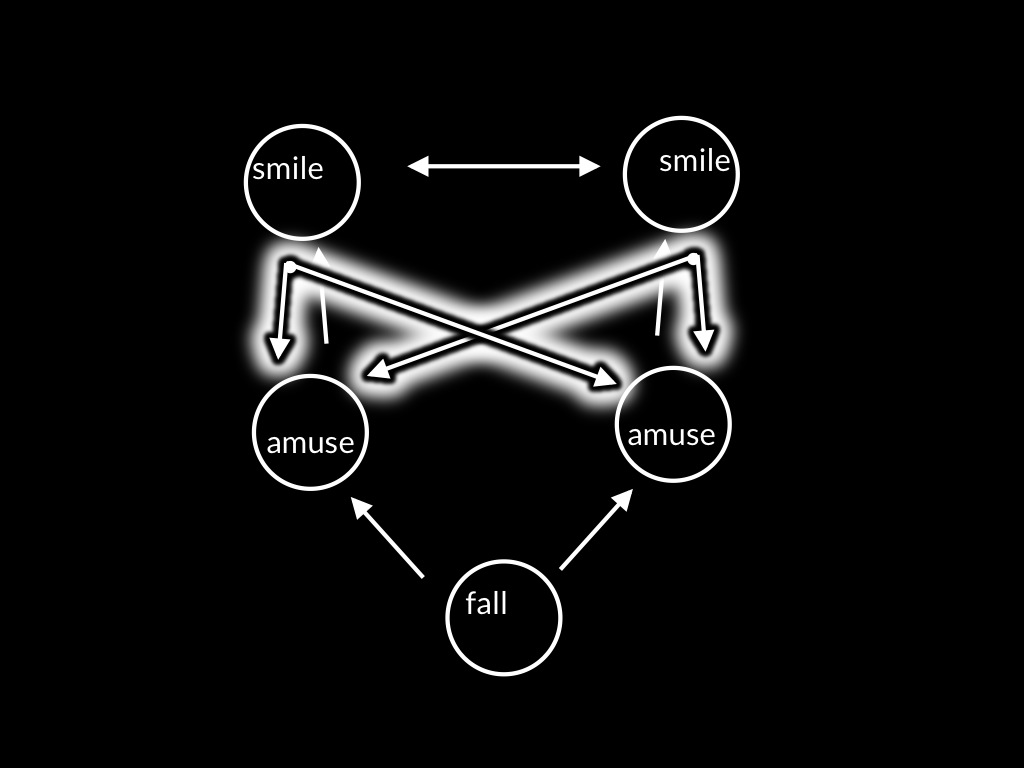
So the way your amusement unfolds is being controlled by, and controlling, the way mine unfolds.
In sharing a smile, we are emotionally locked together.
[*todo: remove motor stuff for this talk! Also: don't lose sight of idea that control is a way of knowing.]
[*todo: need slide with control arrows highlighted (my emotion controls yours).]
[*Structure:
(i) I know because my emotion controls yours;
(ii) But if my emotion controls yours, how can yours be amusement at the clown's falling? because control is partial, and reciprocal;
(iii) But the mere fact of control isn't enough for knowledge; rather, control must show up in experience somehow.
After all, for all I have said so far, we might, in sharing a smile, be unaware that our emotions are locked together.
(iv) There must be an experience that is distinctive of sharing a smile.
(iv) Note that I don’t want to say that someone who is sharing a smile needs to understand the situation in the way I’m describing it.
All I'm claiming is that the fact of reciprocal control somehow affects our awareness.
(v) It may affect in our awareness insofar as we are sensitive to contingencies between our own actions' and others' actions,
and between our actions and the causes of them.
(vi) So my position is this: the reciprocal control justifies each agent in making judgements about how the others' amusement is unfolding,
and this justification is at least indirectly available to the agents by virtue of their having experiences characteristic of sharing a smile.
]
Our being emotionally locked together means that
to a significant extent I am feeling what you are feeling,
that the way my amusement is unfolding matches they way your amusement is unfolding.
So if you know how your own amusement is unfolding and you know that we are emotionally locked together,
you can know much about how my amusement is unfolding.
So joint expressions of emotion like sharing a smile have the potential to enable us to know not just that others are amused but how their amusement is unfolding.
But the fact of reciprocal control (which means our emotions are locked together) together doesn’t all by itself mean that we can know how each other’s emotions are unfolding.
After all, for all I have said so far, we might, in sharing a smile, be unaware that our emotions are locked together.
Now you might think this sounds implausible because its hard to imagine sharing a smile without an experience that is distinctive of sharing a smile.
And it might be natural to describe this experience as an experience of sharing.
But even if that is correct, it’s necessary to say exactly why someone who is sharing a smile is in a position to know things about how the other’s emotion is unfolding.
I don’t want to say that interaction only helps if you know that your emotions are locked together.
That is, I don’t want to say that someone who is sharing a smile needs to understand the situation in the way I’m describing it.
But minimally the fact of reciprocal control must somehow feature in our awareness.
[*The idea in outline:
\begin{enumerate}
\item the ways our amusements unfold is locked together
\item this is in part because a single motor plan has two functions, production of your smile and prediction of my smile
\item the single motor process means that we might experience being locked together in some way (not that our emotions are locked together but that our actions are, in something like (but not exactly) we experience actions when seeing ourselves in a mirror or on CCTV (check Johannes’ discussion of this)).
\end{enumerate}
]
Here I want to offer a wild conjecture.
In joint expressions of emotion there is a single motor plan with two functions,
production and prediction.
The motor plan both produces your own smile and enables you to predict the way the other’s smile will unfold.
[*missing step about monitoring and experience. (The Haggard idea: motor planning can give rise to experiences concerning one's own actions \citep{Haggard:2005sc}.)]
Because your plan has this dual function, your experience of the other’s (my?) smile is special.
From your point of view, it is almost as if the other is smiling your smile.%
\footnote{
Joel caricatured this idea seeing me eating fruit: ‘it’s almost as if I’m eating that fruit.’
}
This means that sharing a smile has characteristic phenomenology.
This odd phenomenological effect means that in sharing a smile we can each think of the situation almost as if there were a single smile.
And almost as if there were a single state of amusement.
(In thinking of the situation like this it is important that we have a subject-neutral conception of the amusement and an agent-neutral conception of the smile.%
\footnote{
Tom Smith asked about this. I clarified that I wasn’t suggesting there was a state of amusement which is ours, nor that the subjects are thinking of the situation in this way.
That’s the point of the appeal to subject-neutral amusement.
It’s a partial model of the situation.
}
[*Here I think I’m shifting back from the perspective of the participants in sharing a smile to the perspective of the theorist.
Probably what I should say is, first, that a theorist can think of the situation in this way and use this to argue, second, that there is a simple, partial conception of the situation that doesn’t require understanding reciprocal control and interlocking emotions but is sufficient for each smiler to have knowledge of the way the other’s emotion unfolds.]
So my suggestion is that in sharing a smile you experience my smile almost as if it were yours (or: you experience me almost as if I were smiling your smile),
and so you might also experience our situation almost as if it involved a single state of amusement.
It's more like we each plan a single smile.
But---to reply to the objection---these plans have a dual function.
Your plan both produces your own smile and enables you to simulate---to experience---my smile.
And likewise for my plan.
The interdependence of our smilings means that we could each think of the situation as if it were one in which a single state of amusement were responsible for our actions.