\title {A Talk \\ Purposive Action from Motor Representation to Intention}
\maketitle

Purposive Action from Motor Representation to Intention
[email protected]
\def \ititle {Purposive Action from Motor Representation to Intention}
\begin{center}
{\Large
\textbf{\ititle}
}
\iemail %
\end{center}
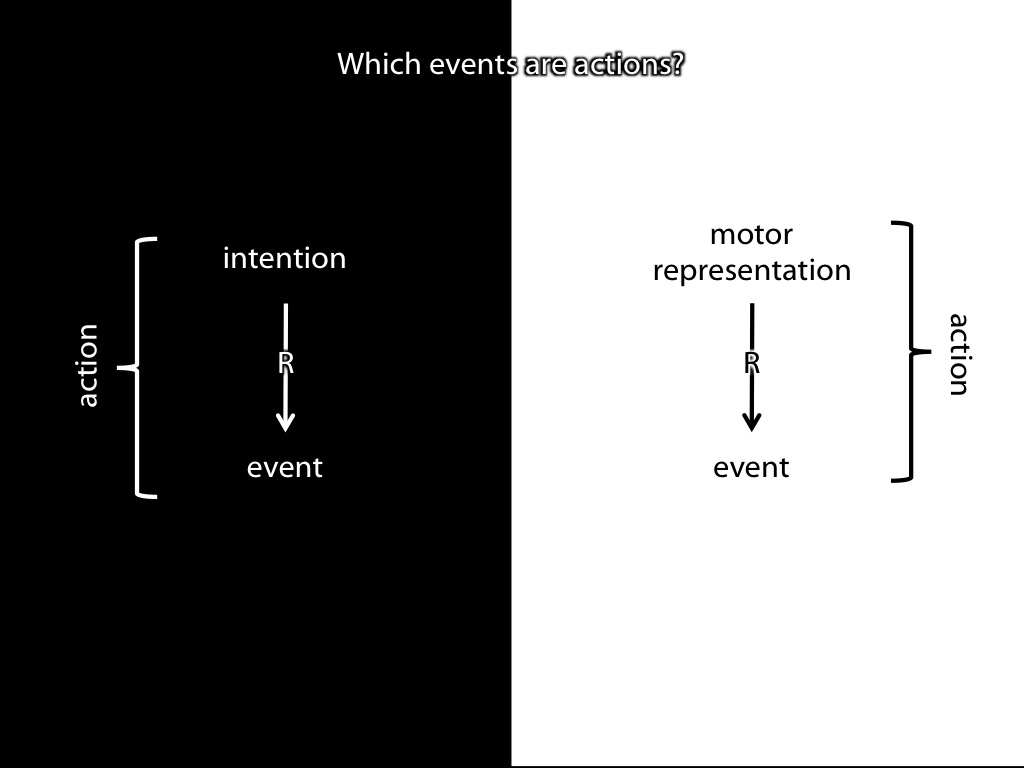
Which events are actions?
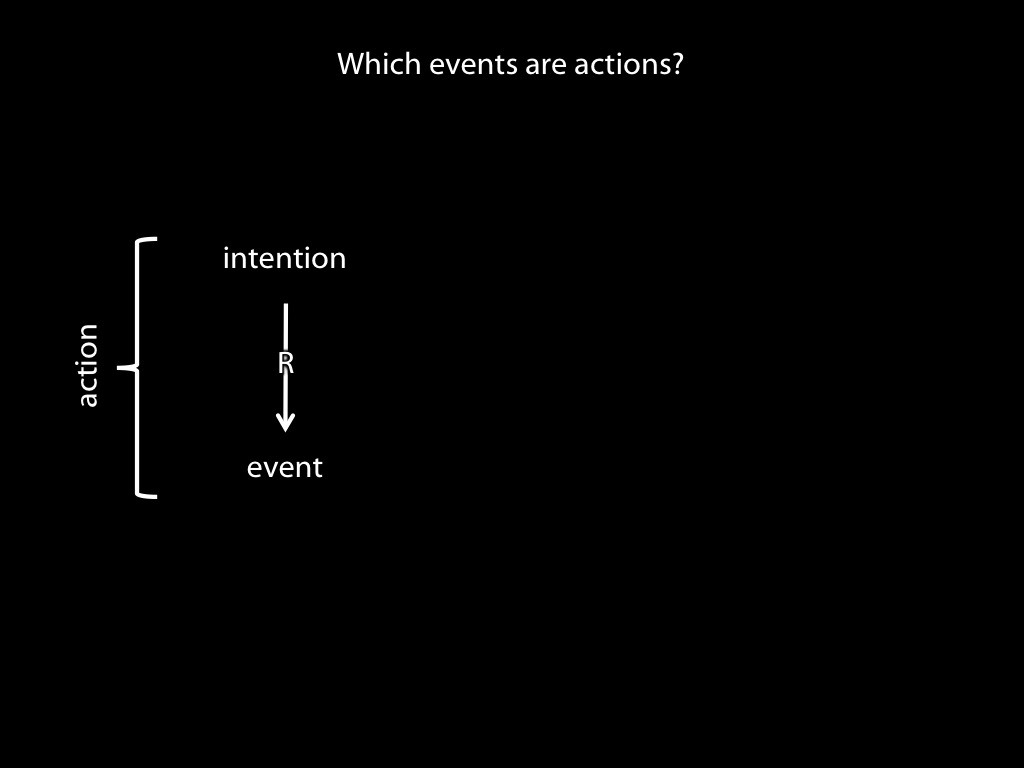
In philosophy this question is typically answered by appeal to intention
or practical reasoning.
One quite standard idea is that those events are actions which are appropriately
related to an intention. Such views tend to be neutral on how
the attitudes and processes ultimately connect to bodily movements;
that is considered to be merely an implementation detail ...
They are neutral in this sense: the views do not depend in any way on facts about that
distinguish one kind of body from another, or on facts about how the body’s movements
are ultimately controlled ...
In cognitive science ... little to say about actions whose purposes
involve things the motor system doesn’t care about---your motor system
doesn’t care whether the plane you are stepping is headed for Milan or
for Rome, but this sort of difference can affect whether your actions succeed or fail.

motor representation
Let me mention some almost uncontroversial facts about motor representations and
their action-coordinating role.
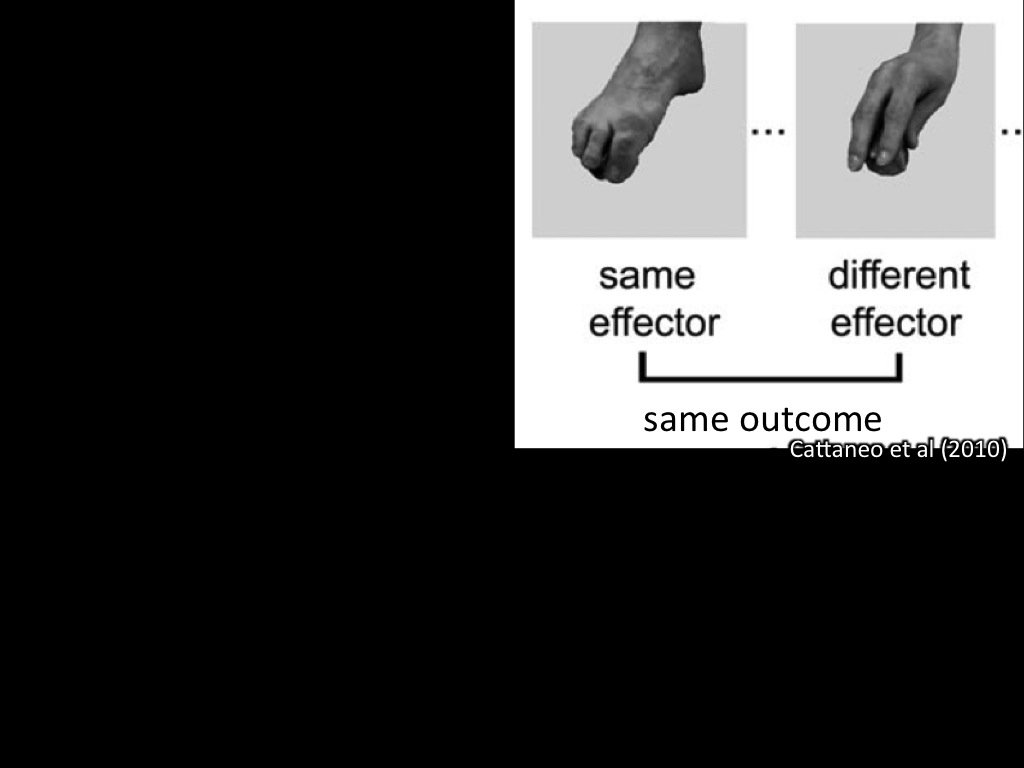
Markers of motor representation
The experiments providing such evidence typically involve a marker of motor representation,
such as a pattern of neuronal firings, a motor evoked potential or a behavioural performance
profile, which, in controlled settings, allows sameness or difference of motor representation
to be distinguished. Such markers can be exploited to show that the sameness and difference
of motor representation is linked to the sameness and difference of an outcome such as the
grasping of a particular object.
(Pioneering uses of this method include \citealp{rizzolatti:1988_functional,Rizzolatti:2001ug};
it has since been developed in many ways: see, for example,
\citet{hamilton:2008_action, cattaneo:2009_representation, cattaneo:2010_state-dependent,
rochat:2010_responses, bonini:2010_ventral, koch:2010_resonance}.)
Although not decisive,%
\footnote{%
For further considerations, see \citet[pp.~143--6]{prinz:1997_perception} and
\citet{pacherie:2008_action}.
}
this supports the view that some motor representations represent outcomes other than
sequences of bodily configurations and joint displacements.
As we will see, this view is foundational for much research on how motor processes
coordinate action.
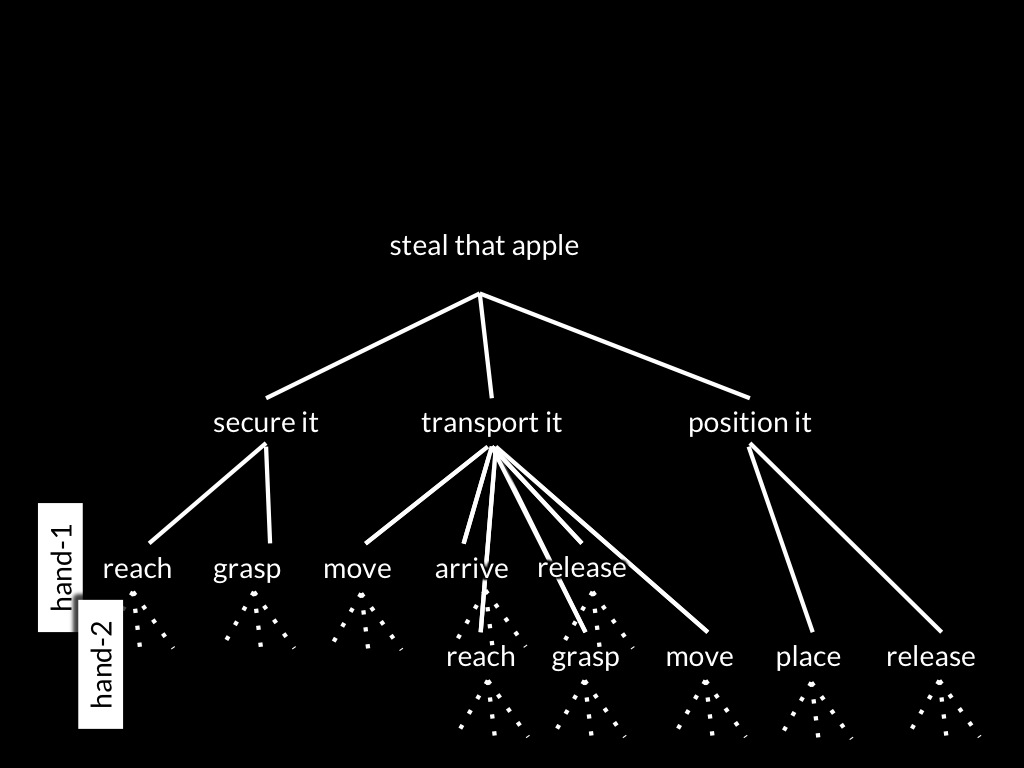
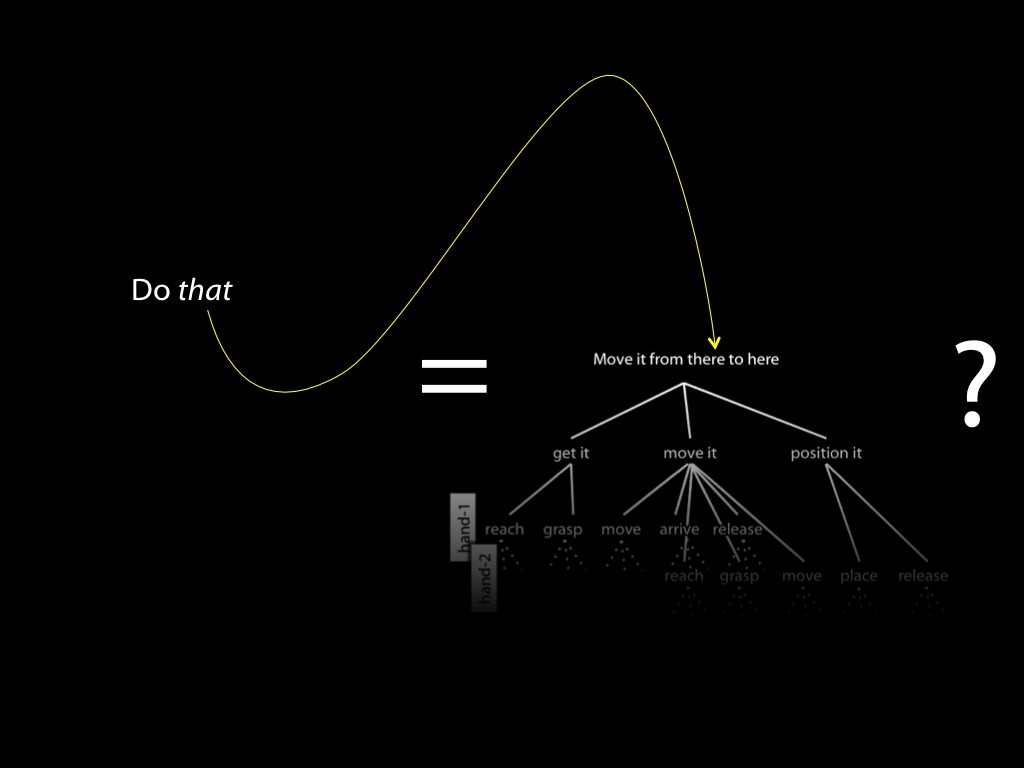
To illustrate, consider a sequence of actions which might be involved in shoplifting an apple: you have to secure the apple, transport it, and position it in your pocket.
Each of these outcomes can be represented motorically.
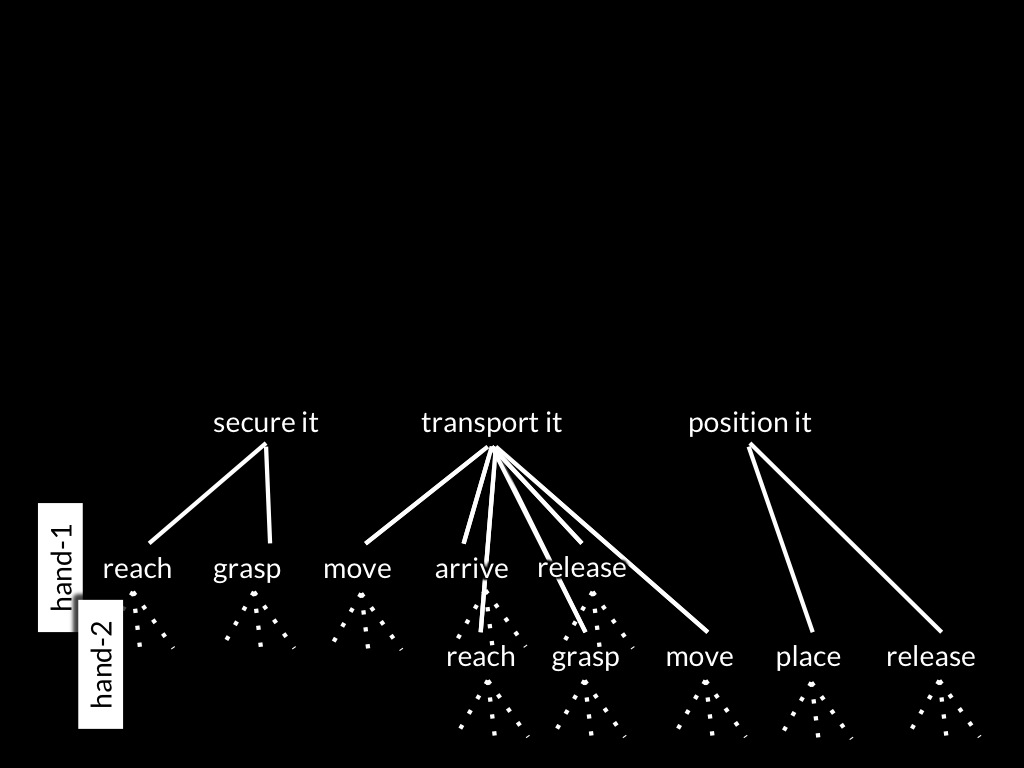
Motor processes are planning-like in that they involve computing means from ends.
Thus a representation of an end like securing it [the apple] can trigger a process
that results in the representation of outcomes that are means to this end.
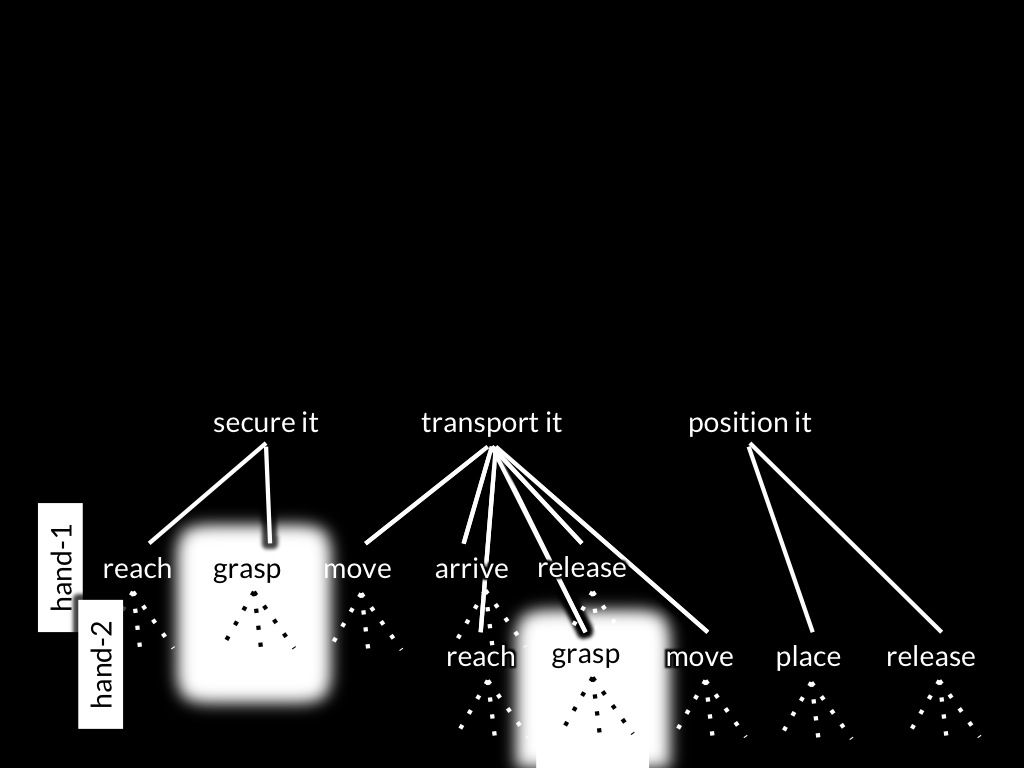
Motor processes are also planning-like in that which means are selected in preparing an
action that will occur early in the sequence may affect needs that will arise only later
in a later part of the actions.
For instance, how the apple is grasped at an early point in the sequence may be determined
in part by what would be a more comfortable way for the other hand to grasp it later.
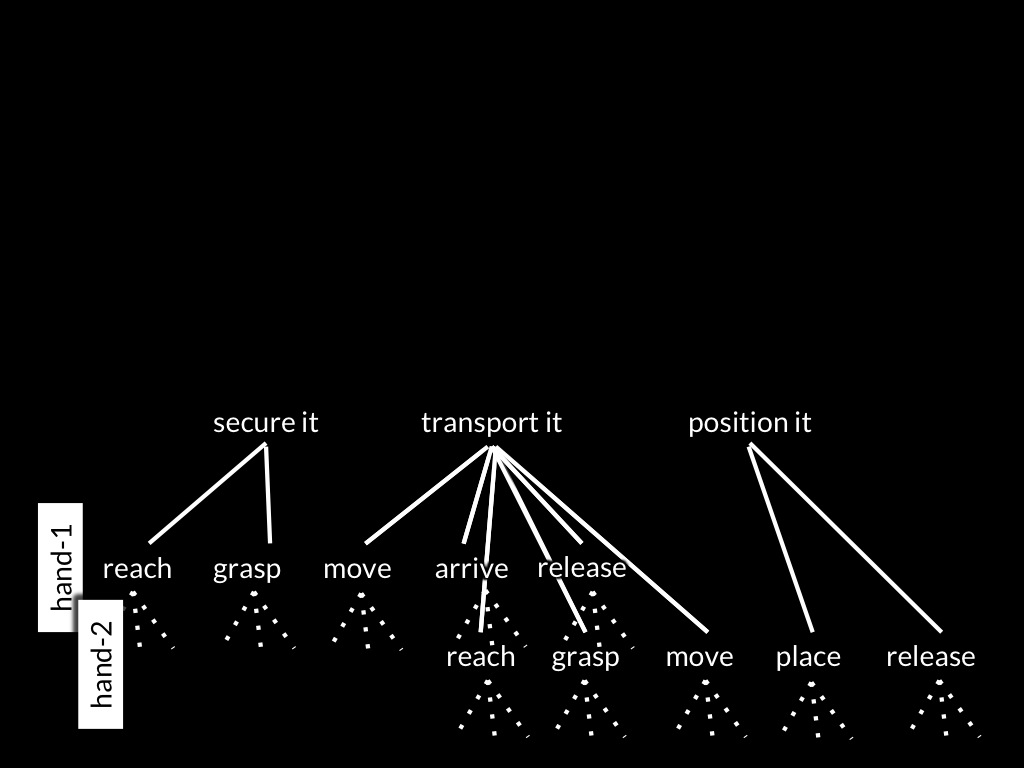
So motor representations of outcomes guide planning-like processes.
This is why I think it’s not just that they carry information about outcomes
like grasping an apply, but that they also represent such outcomes.
\section{Motor Representations Aren’t Intentions}
\section{Motor Representations Aren’t Intentions}
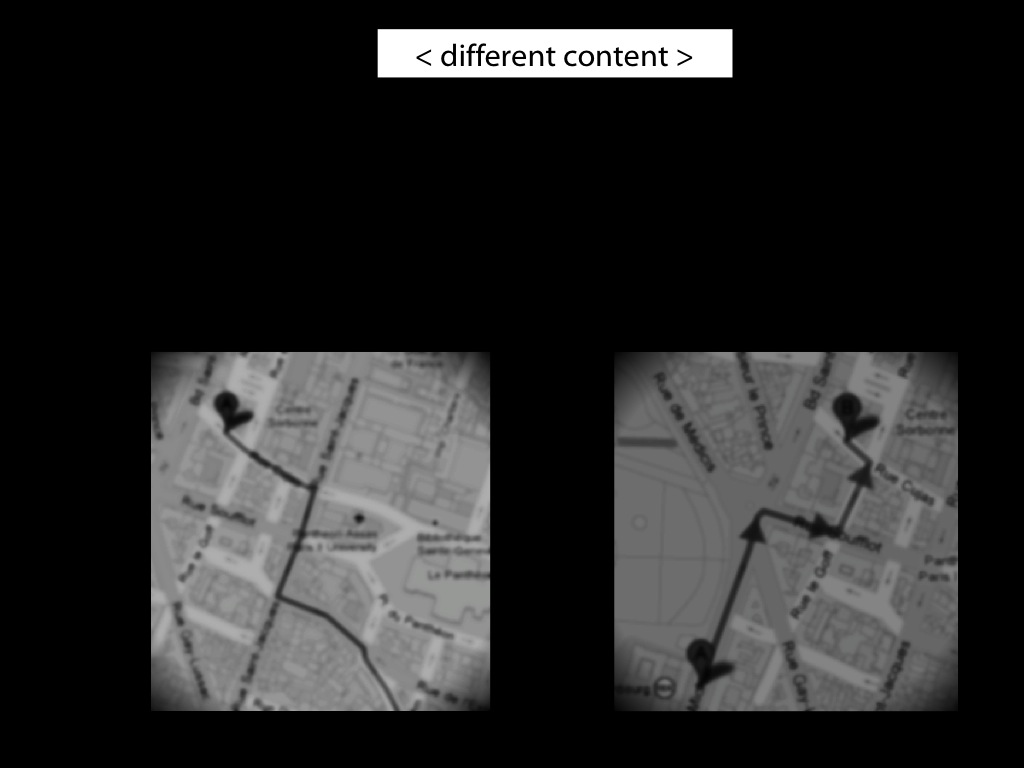
As background we first need a generic distinction between content and format.
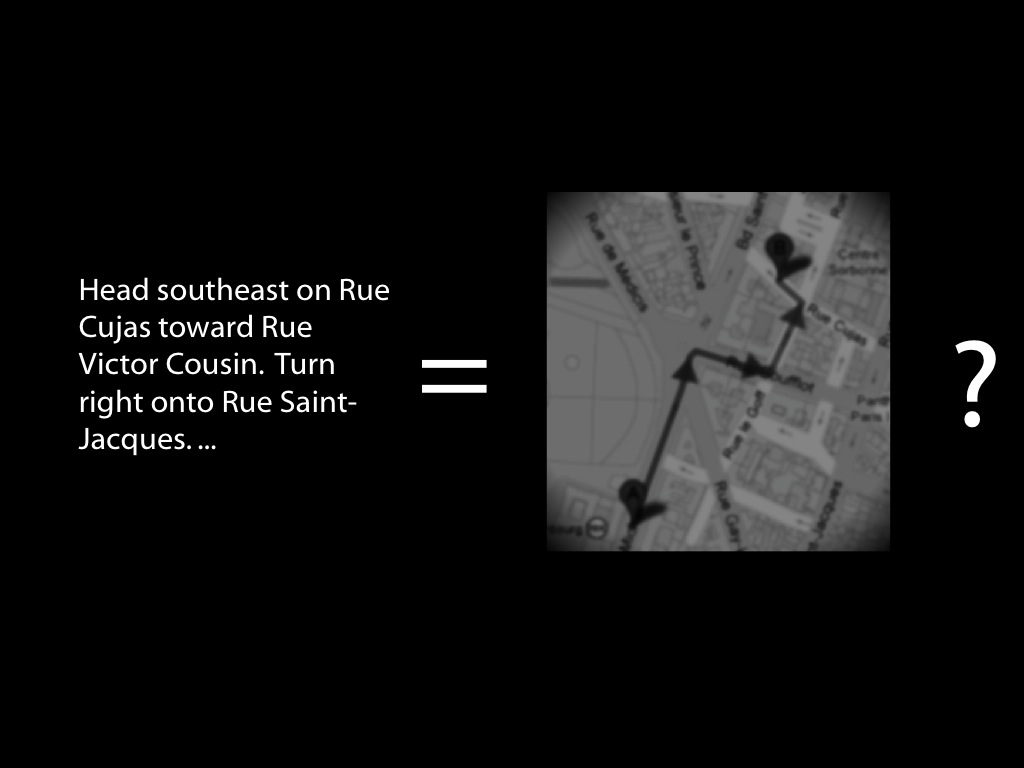
Imagine you are in an unfamiliar city and are trying to get to the central station.
A stranger offers you two routes. Each route could be represented by a distinct line
on a paper map. The difference between the two lines is a difference in content.
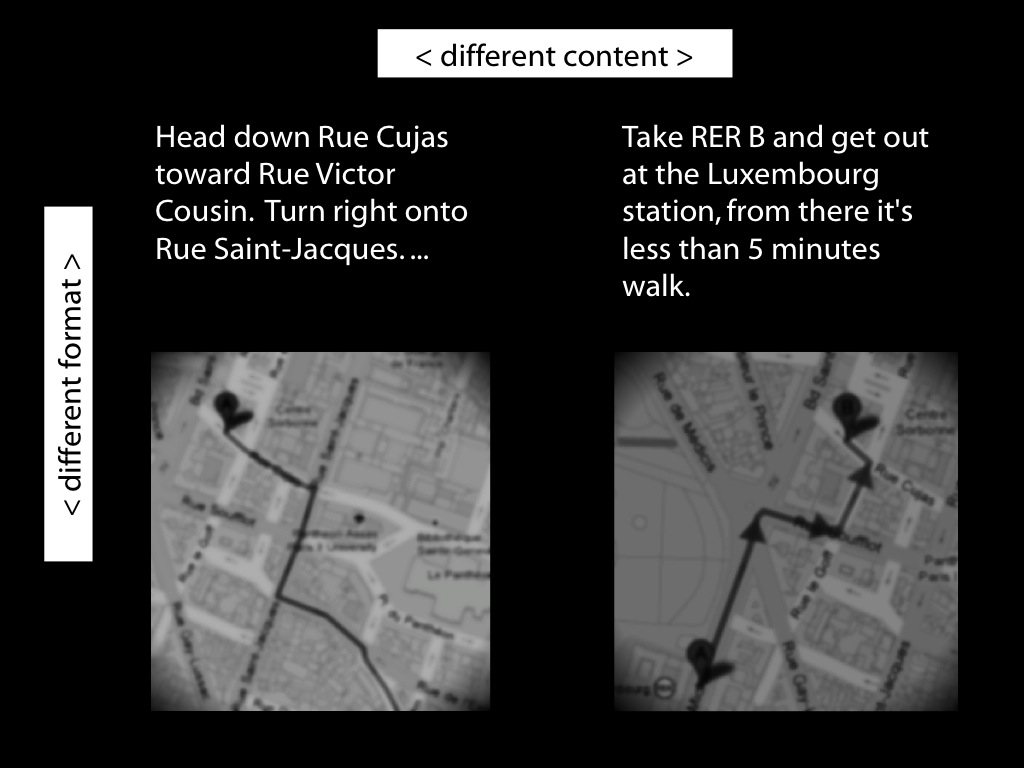
Each of the routes could alternatively have been represented by a distinct series
of instructions written on the same piece of paper; these cartographic and
propositional representations differ in format. The format of a representation
constrains its possible contents. For example, a representation with a cartographic
format cannot represent what is represented by sentences such as `There could not be a
mountain whose summit is inaccessible.'\footnote{ Note that the distinction between
content and format is orthogonal to issues about representational medium. The maps in
our illustration may be paper map or electronic maps, and the instructions may be spoken,
signed or written. This difference is one of medium.} The distinction between content and
format is necessary because, as our illustration shows, each can be varied independently
of the other.
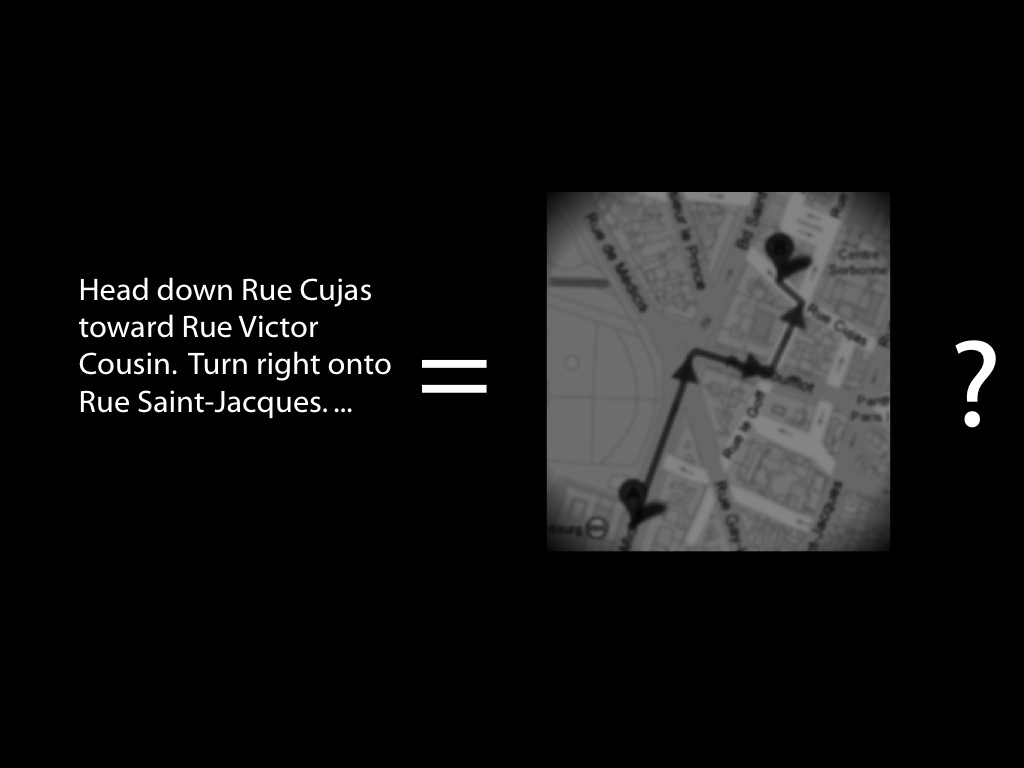
Format matters because only where two representations have the same format can they be straightforwardly inferentially integrated.
To illustrate, let’s stay with representations of routes.
Suppose you are given some verbal instructions describing a route. You are then shown a representation of a route on a map and asked whether this is the same route that was verbally described. You are not allowed to find out by following the routes or by imagining following them.
Special cases aside, answering the question will involve a process of translation because two distinct representational formats are involved, propositional and cartographic. It is not be enough that you could follow either representation of the route. You will also need to be able to translate from at least one representational format into at least one other format.
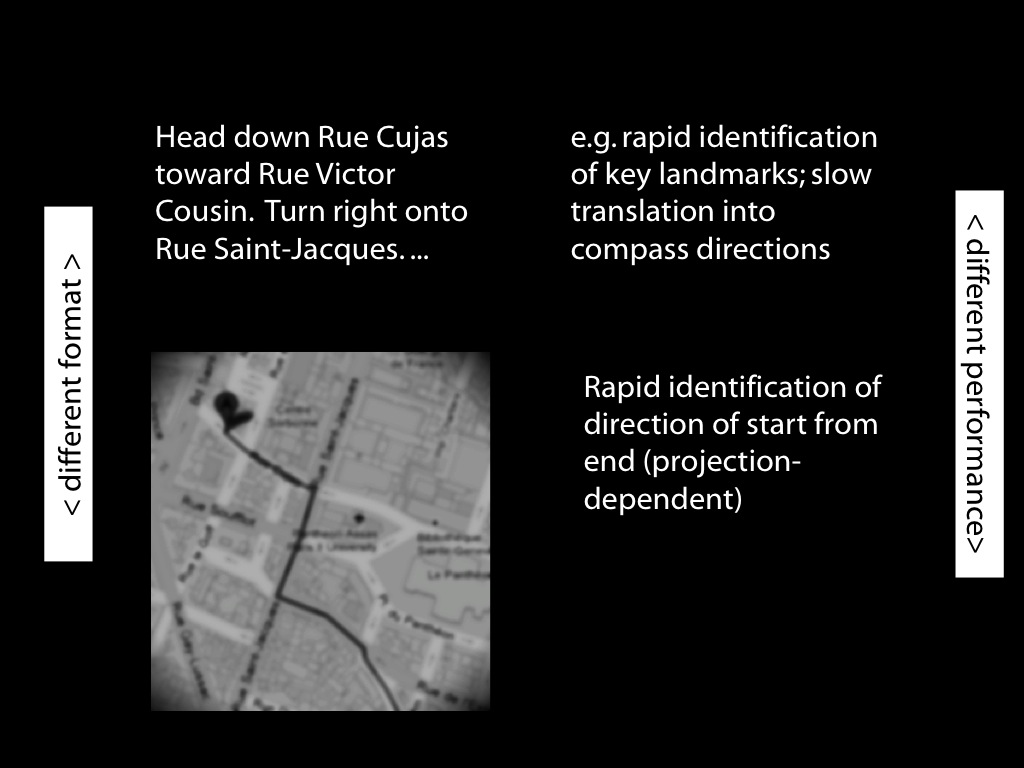
How in general can we identify or distinguish representational formats? Because representational formats are typically associated with characteristic performance profiles, it is sometimes possible to infer similarities and differences in representational format from similarities and differences in the processes in which representations feature.
To illustrate, suppose that you have a route representation and I want to work out whether it this representation has a cartographic or propositional format. One way to do this might be to test your performance on different tasks. If the representation is propositional you are likely to be relatively fast at identifying key landmarks but relatively slow at translating the route into a sequence of compass directions; but the converse will be true if your representation is cartographic.
The same principle---distinguishing and identifying formats by measuring characteristic processing profile---works for mental representations too.
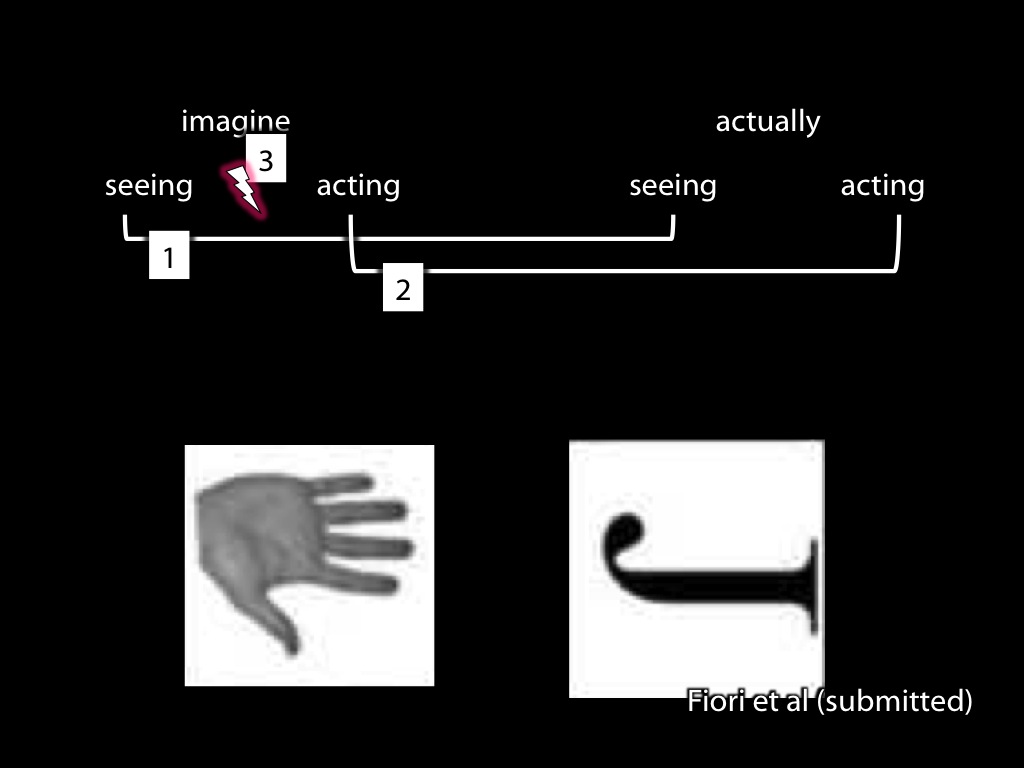
To illustrate, compare imagining seeing an object moving with actually seeing it move.
For this comparison we need to distinguish two ways of imagining seeing. There is a way of
imagining seeing which phenomenologically is something like seeing except that it does not
necessarily involve being receptive to stimuli. This way of imagining seeing, sometimes
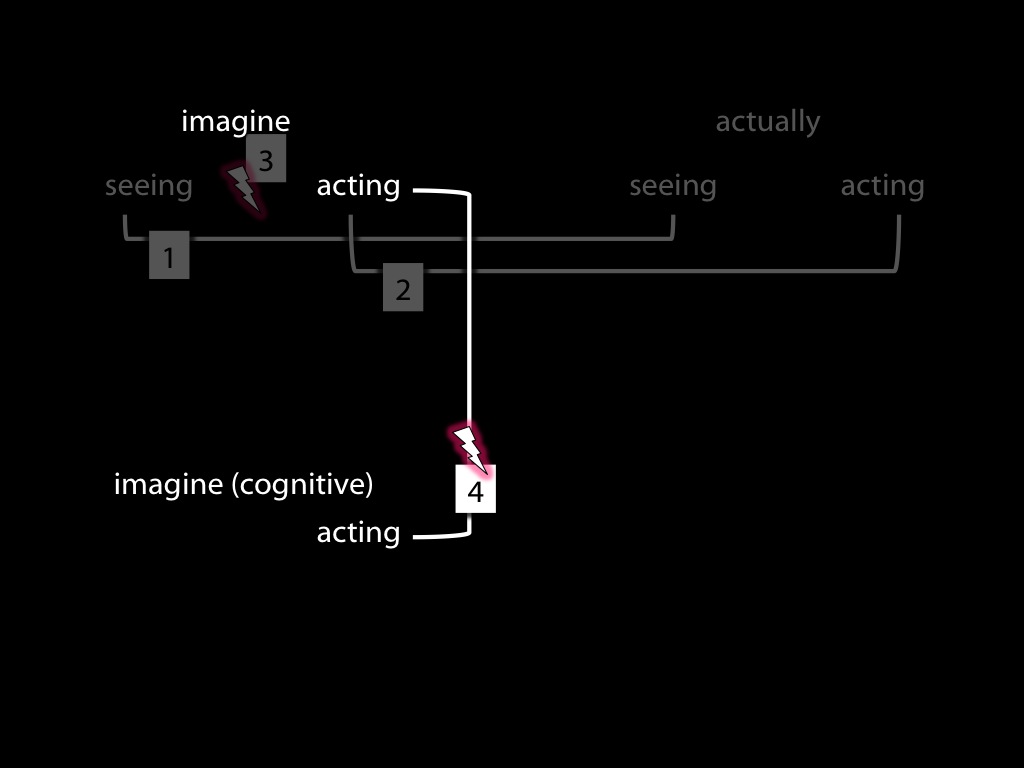
called `sensory imagining', is commonly distinguished from cognitive ways of imagining
seeing which might for example involve thinking about seeing.
It is this way of imagining seeing an object move that we wish to compare with actually
seeing an object move.
Imagining seeing an object move and actually seeing an object move have similarities in characteristic performance profile. For instance, whether an object can be seen all at once depends on its size and distance from the perceiver; strikingly, when subjects imagine seeing an object, whether they can imagine seeing it all at once depends in the same way on size and distance (\citealp{kosslyn:1978_measuring}; \citealp[p.\ 99ff]{kosslyn:1994_image}).
Also, how long it takes to imagine looking over an object depends on the object's subjective size in the same way that how long it would take to actually look over that object would depend on its subjective size \citep{kosslyn:1978_visual}.
The similarities in characteristic performance profile and the particular patterns of interference are good (if non-decisive) reasons to conjecture that imagining seeing and actually seeing involve representations with a common format.
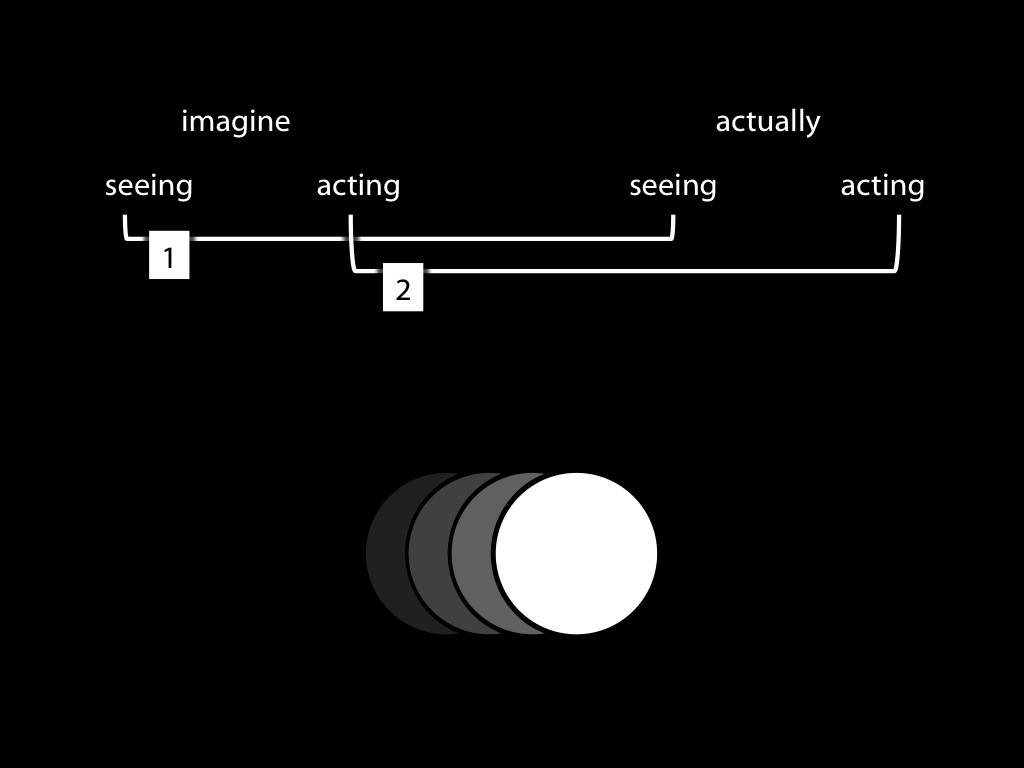
One way of imagining action is phenomenologically something like acting except
that such imaginings are not necessarily responsive to the features of actual
objects and do not necessarily result in bodily movements.
There is evidence that the way imagining performing an action unfolds in time is
similar in some respects to the way actually performing an action of the same type would unfold.
For instance, how long it takes to imagine moving an object is closely related to
how long it would take to actually move that object \citep{decety:1989_timing,
decety:1996_imagined, Jeannerod:1994oz}.
In addition, for actions such as grasping the handle of a cup, manipulating the
target object in ways that would make the action harder (such as orienting the cup's
handle to make it less convenient for you to grasp) make a corresponding difference to
the effort involved in imagining performing the action \citep{parsons:1994_temporal,
frak:2001_orientation}.
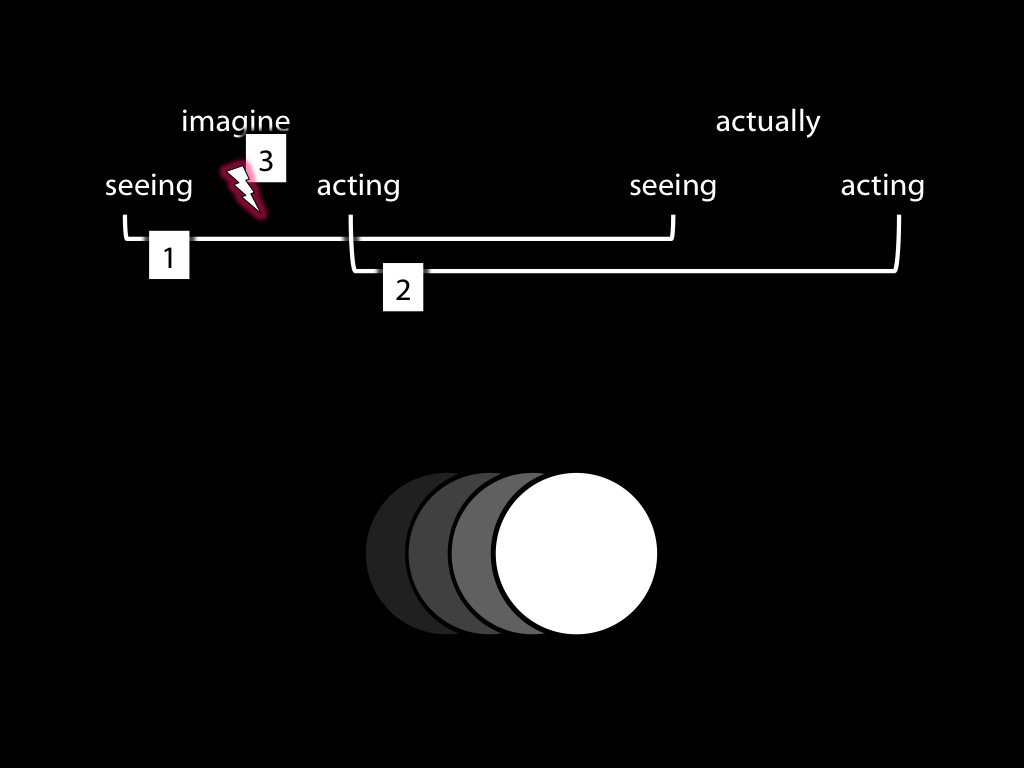
Contrast imagining rotating a ball with imagining seeing a ball rotate.
As is implied by what we’ve already said, these have quite different characteristic performance profiles.
How quickly the former can be done is a function of how long it would take the agent to rotate the ball, whereas how quickly the latter can be done depends on how rapidly the ball can rotate and still be perceived as rotating.
Further, in some cases rotating a ball clockwise is easier than rotating it anti-clockwise, and so is imagining a ball rotate. By contrast, the effort involved in actually seeing or imagining seeing a ball rotate does not similarly differ depending on direction.
So where does this leave us with respect to our starting point,
the ‘Two Stories’ view?
On the face of it, everything I’ve said so far is compatible with that View
and might even be taken to support it.
But ...
Recall stealing an apple ...
Imagine you are a hungry shoplifter with a powerful desire for an apple. After carefully
considering the pile of apples on the stall, you identify one that can be discretely
snatched and form an intention to steal that apple as you casually saunter past the stall.
In grasping, transporting and pocketing the apple your movements are controlled by motor
representations of these outcomes. So your theft depends on an intention, on some motor
representations and on there being a match between the outcome specified by the intention
and the outcomes specified by the motor representations.
In short: practical reasoning and motor processes are part of a single story about the
performance of action; there must be non-accidental matches between the contents of
intentions and motor representations.
\textbf{So we can’t accept the Two Stories View because there must sometimes be content-respecting
causal interactions involving intentions and motor representations.
Without these, our intentions and motor representations would never non-accidentally
have synergistic effects on our actions.}
There is a way to make the problem of comparison between representational formats trivial
Suppose one representation involves a demonstrative that refers by deferring to another representation
Then the comparison doesn’t require translation between formats after all.
Maybe the same can be true for intentions and motor representations.
Maybe intentions can involve demonstrative concepts which refer to actions by deferring to motor representations?
[*cut:
Set that aside, suppose it can be solved --- essentially because MR must give rise to experience of action.
On this view, it is demonstrative deference to motor representation that connects intentions to bodily movements.
Only by recognising how intentions interlock with motor representations can we hope to understand how our intentions ever make a difference to the world around us.
On this view experience of action plays a novel role.
Action experiences in which motor representations feature, such as those associated with motor imagery and those associated with really acting, are arguably necessary for there to be concepts which are constituents of intentions and refer to actions by deferring to motor representations.
But if, as we conjecture, such deference is necessary for intentions to properly and reliably result in bodily movements, it may turn out that intentionally acting in the world de- pends on action experiences featuring motor representation.
Much as on some views thought about objects depends on perceptual experience (e.g. Campbell 2002), so also intending actions may depend on motor experience.
But we can’t point to motor representations like we can point to maps!
What we need for reference by deference to a motor representation is experience of motor action.
And if you think about motor imagination it seems quite plausible that we do have such experiences.
So here’s the thought:
There are no direct inferential connections between intentions and motor representations.
Harmony is ensured by the fact that where an intention involves a bodily movement, either executing that intention involves forming a further intention or else the intention involves a demonstrative that refers to an action by deferring to a motor representation.
So what connects intentions to motor representations---what connects the reflective to the pre-reflective---is the use of demonstratives, and this depends on experience of motor action.
Much as on some views all thought about objects ultimately depends on perceptual experience (e.g. Campbell 2002), so also intending bodily actions may ultimately depend on motor experience.
Experience anchors the reflective in the pre-reflective.